2023年6月9日,2023届福建省机械类本科毕业设计大赛决赛于福州大学机械工程及自动化学院举办。根据《关于2023届新工科机械类本科生毕业设计大赛的通知》文件精神,通过初审、函评、现场答辩等多个评比环节的激烈角逐,由本实验室黄异老师指导的本科生谢鸿荣同学的《基于LabVIEW和STM32的四足机器人监测系统设计》毕设作品在众多项目中脱颖而出,荣获大赛一等奖。




毕设作品简介:
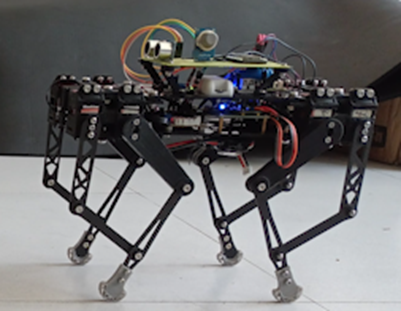
小型四足机器人作为一种机电一体化的智能机器人,具有优秀的运动性能和灵活性,可以在多种复杂环境中实现移动、定位和控制等任务。随着科技的不断发展和应用场景的不断扩展,小型四足机器人已经逐渐进入人们的生活和工作中,在未来的发展中有着广阔的应用前景。该毕设作品借助 MATLAB、ANSYS 等软件工具,设计一种装载有监测系统的小型四足机器人,并用 LabVIEW 编写上位机控制机器人运动和实现环境监测。本毕业设计主要关注三方面内容:机器人的结构和设计、机器人的动态控制、以及机器人的控制系统建立。