一、导读
转子瞬时转速是各类旋转机械运行状态监测的重要参考信息,在待测转子表面安装各类传感器是当前获取转速的常规测量方法,虽然这类方法应用广泛,但是接触式传感器由于其自身质量、材质等因素,安装在待测转子上可能会影响转子本身的运动特性从而影响其正常工作,因此非接触式测量方法在工业应用中具有更好的测量便捷性等优点。
2024年12月,福建省太赫兹功能器件与智能传感重点实验室在中科院二区期刊《IEEE Transactions on Instrumentation and Measurement》(IF 5.6)发表了题为“Instantaneous Rotational Speed Sensing Method Using Circumferential Constant-Density-Sine Fringe Pattern”的文章。实验结果表明:在所设置实验条件下,所提测量系统能够达到0.01度的旋转角位移分辨率;在恒、变转速下具有与编码器相似转速测量精度的同时能够准确识别到转子旋转方向的变化;在低至1 rpm的极低转速下也能够克服编码器测量不稳定的问题,实现转速的稳定测量。文章第一作者为钟剑锋教授,第二作者为2021级硕士研究生池守疆,重点实验室主任钟舜聪教授是本文的通讯作者。
二、内容简介
文章首先基于提出的周向恒密度正弦条纹(CCDSFP)转子转速测量系统建立了转子表面CCDSFP的数学成像模型,基于该成像模型建立了转子瞬时转速视觉条纹感测方法,以实现转子旋转方向和转速的感知测量。
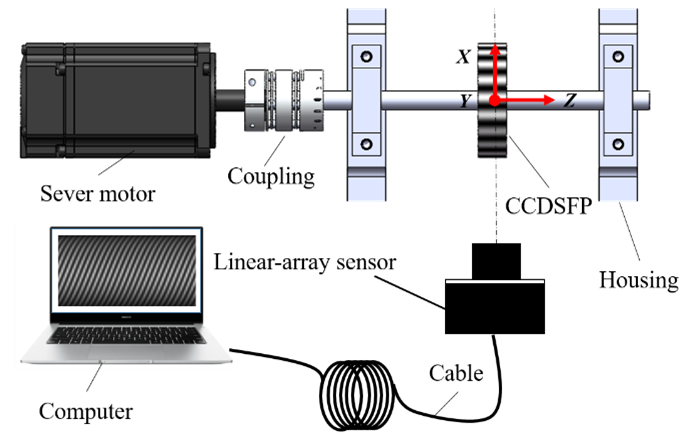
Fig.1. Layout of the proposed IRS measurement system.
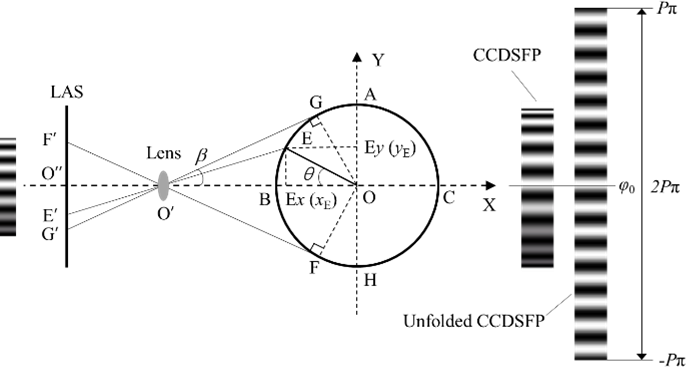
Fig.2.Schematic diagram of the CCDSFP imaging.
基于图2所示CCDSFP成像示意简图推导得到如下条纹成像模型:
由上述条纹成像模型经过模拟推导得到相邻帧条纹相关系数与瞬时转速的对应关系为:
测量系统的角位移分辨率(ADR)与瞬时转速的测量精度密切相关,测量系统的ADR理论上取决于被测旋转部件的转速和成像传感器的帧率。相邻帧条纹信号之间的角位移为:
在实际测量中,图像噪声、光照条件和条纹截断等影响因素会影响相邻帧条纹信号之间CC值的计算精度。因此,提出在进行瞬时转速计算前对所获得的条纹信号进行预处理,如图3所示,包括归一化、加窗和滤波。首先,对原始条纹信号进行归一化,以提高后续算法处理的稳定性。其次,对原始条纹信号应用汉宁窗进行加窗处理,以减少后续滤波中条纹截断引起的频谱泄漏。最后,使用保留相位信息的滤波器对加窗后的条纹信号进行滤波,在保留条纹信号主频率分量的同时去除噪声。
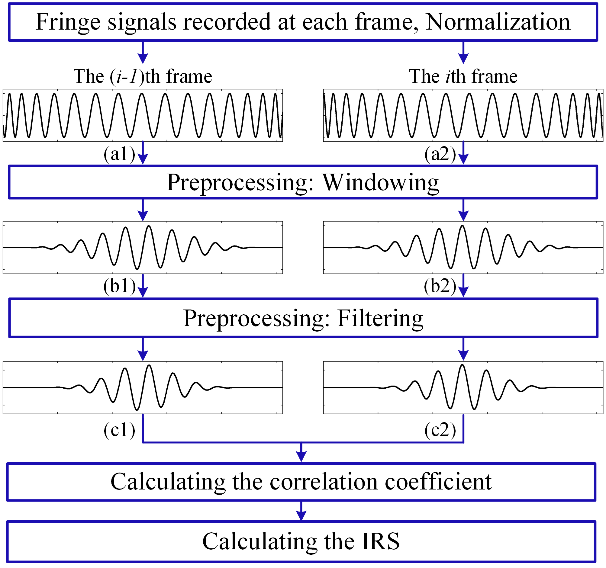
Fig.3.Fringe processing steps for the calculation of IRS.
搭建如图4所示的实验系统对所提转速感测方法的角位移分辨率进行验证:
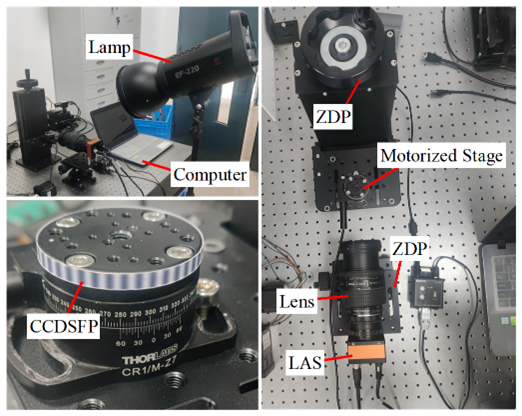
Fig.4. ADR verification system.
通过计算不同间隔帧条纹之间的相关系数,可以获得相应角位移。由图5所示实验结果可知,若可接受的测量相对误差(MRE)在1%以内,则可以认为0.01度是当前实验测量系统的ADR。
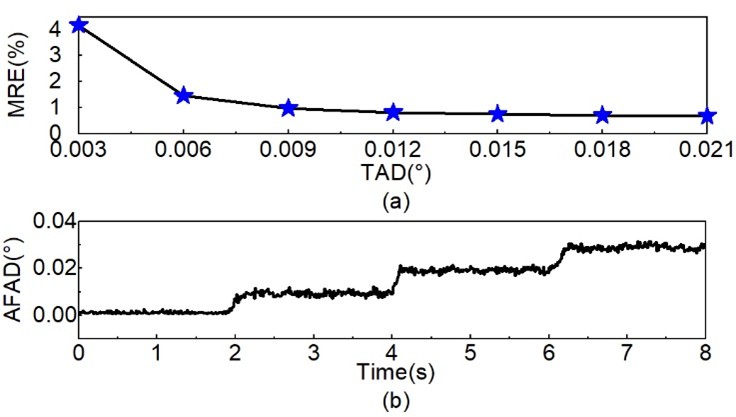
Fig.5. ADR experimental results. (a) Analysis of MRE for different angular displacements. (b) The calculation results of adjacent frame angular displacement (AFAD).
搭建如图7所示的实验系统对所提转速感测方法的转速测量性能进行验证。
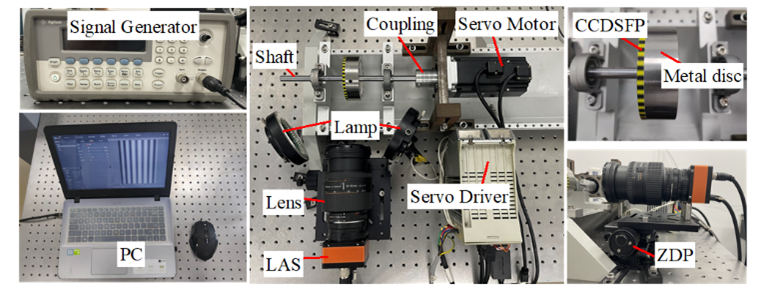
Fig.6. Servo rotor experimental system.
采用传统编码器和所提方法对于不同形式的转速分别进行对比测量实验,得到测量结果如图7-图9所示:
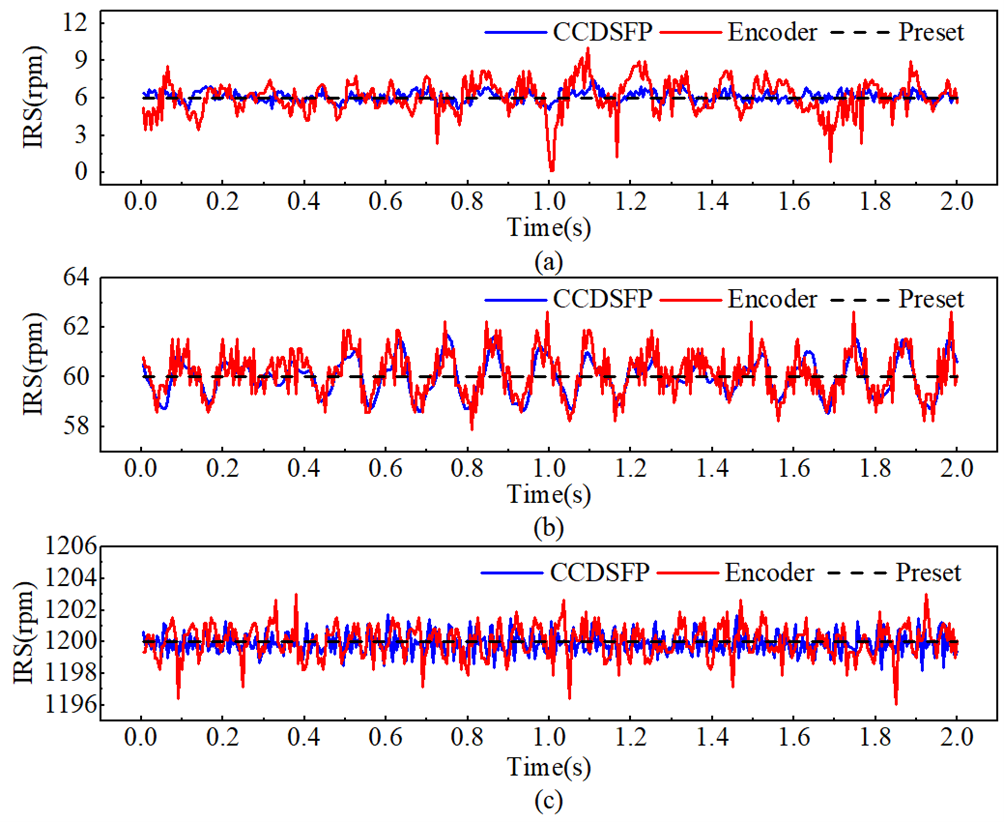
Fig.7. Comparison of the IRS curves obtained by servo motor built-in encoder and the proposed IRS sensing system. Results for constant rotational speed of 6 rpm (a), 60 rpm (b) and 1200 rpm (c).
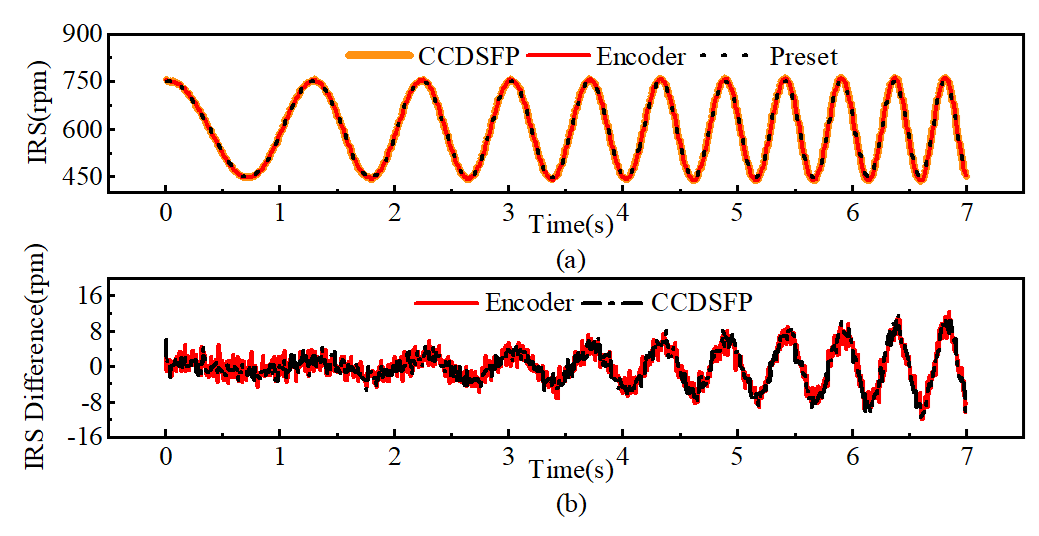
Fig.8. Measurement results for time-varying rotational speed. (a) IRS curves by CCDSFP and encoder. (b) IRS difference curves between the preset one and the measured ones by CCDSFP and encoder.
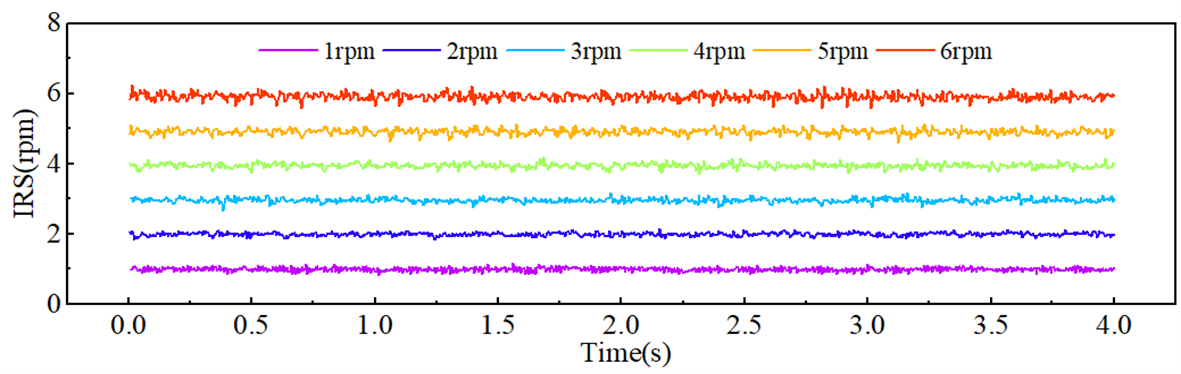
Fig.9. Results of extremely low-speed experiment.
在指定实验条件下,测量系统可以实现0.01度的角度分辨率;针对不同恒定转速、变转速进行测量实验,实验结果表明:在低转速下,相比于编码器计算单位时间内脉冲得到转速的原理而言,所提转速感测方法具有更好的测量精度和稳定性;当待测转速变大时,所提方法也能够在实现非接触测量的同时达到与编码器相似的测量精度。
三、总结
本文提出了一种基于线阵相机和转子周向恒密度正弦条纹的瞬时转速感测方法,相较于普通面阵相机,线阵相机具有较高的帧率和极低的内存占用率。相较于编码器,线阵相机获取到的转速信号间不具有耦合性,任意两帧条纹得到的都是独立的转速信号,在低转速下仍能保持稳定的测量精度。此外,所提转速感测方法几乎无附加质量从而避免对转子本身的动态特性造成影响。
综上,所提转速感测方法相比于其他转速测量方法具有非接触、测量成本低、测量转速范围广、所需测量数据少等优势。为旋转机械的在线监测和故障诊断提供可靠的转速数据,对提高工业测量能力,推进旋转机械运行监测朝精确化、智能化发展具有重要工程和科学意义。
原文链接:DOI: 10.1109/TIM.2024.3502727