一、导读
当多维力传感器在叠加式多维力标定装置上进行标定时,由于某一分量载荷的施加会使被标定传感器在该维度方向产生伸长或压缩变形,而这个变形会使其他方向的串接机构产生挠曲变形,进而在其他方向的参考传感器上产生侧向力,形成维间耦合,导致传感器读数出现偏差。针对该问题,提出采用矩形双轴柔性铰链作为被标定传感器与参考传感器的串接机构,研究其几何参数对力传感器(参考传感器)耦合效果的影响,从而减少多维力标定装置的耦合,以提高多维力传感器标定的准确度水平。
2025年4月,福建省太赫兹功能器件与智能传感重点实验室在JCR一区期刊《Measurement Science and Technology》发表了题为“Influence of the geometric parameters of two-axis rectangular flexure hinges on the coupling of the force sensor”的文章。实验结果表明:矩形双轴柔性铰链加载端施加的挠度越大,固定端的反力越大,从而加剧了参考传感器输出的耦合效应;柔性铰链中,减小柔性区域的截面宽度b、厚度h或增大其长度l,均可降低因加载端挠曲产生的耦合效应,其中减小厚度h是最小化耦合的最有效方法;矩形双轴柔性铰链在径向上表现出方向顺应性,这导致在挠度相同的情况下,y和z方向上的耦合速率不同。文章第一作者为梁伟教授,第二作者为2022级硕士研究生谢智杰,重点实验室李劲林老师是本文的通讯作者,实验室主任钟舜聪教授参与了课题研究,并做出重要贡献。
二、内容介绍
文章提出柔性铰链作为串接机构的叠加式多维力标定装置示意图如图1(a)所示。简化后的耦合简图如图1(b)所示。矩形双轴柔性铰链的模型图如图1(c)所示。
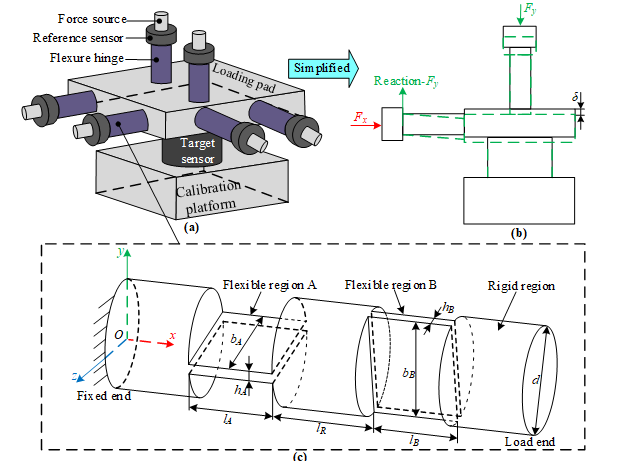
图1 原理图:(a)叠加式多维力标定装置示意图;(b)耦合示意图;(c)矩形双轴柔性铰链模型。
如图2所示,本研究通过对比分析宽度、厚度及长度等结构参数对固定端反力的影响程度与作用效果。研究发现,各结构参数对固定端反力的影响程度存在差异,且从图2中可直观确定其中影响最为显著的结构参数。
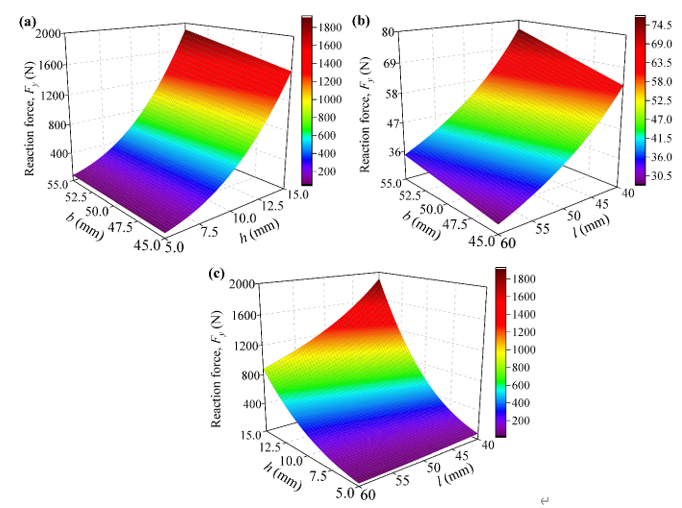
图2 矩形双轴柔性铰链固定端反力与结构参数的关系:(a)宽度b;(b)厚度h;(c)长度l。
为探究不同结构参数的矩形双轴柔性铰链对参考传感器的耦合影响,设计制造如图3所示的柔性铰链。所有铰链均采用40CrMo线切割加工而成,共加工计15个铰链,编号为1~15。

图3 矩形双轴柔性铰链实物图
搭建如图4所示的实验系统对所设计的矩形双轴柔性铰链进行耦合实验验证。实验过程中矩形双轴柔性铰链受力变形图及原理图如图5所示。
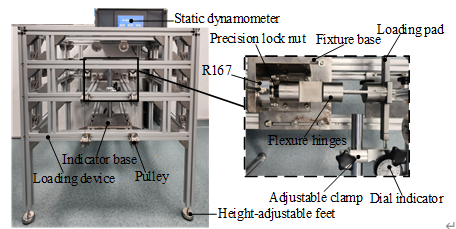
图4 实验系统
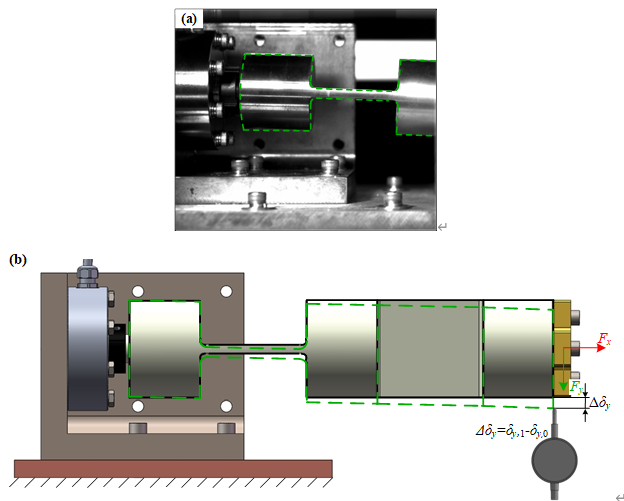
图5 矩形双轴柔性铰链受力变形图及原理图
如图6为在主分量x轴方向上施加450 N载荷,再在柔性铰链末端施加挠度Δδy或Δδz,得到各支链的耦合率。实验结果表明:
(1)较小的宽度和厚度以及较长的长度可以减小柔性铰链加载端挠曲引起的耦合效应。优化柔性铰链的结构参数—减小b、h或增大l—将使参考传感器的测量误差最小化。随着b和h的减小或l的增大,挠度引起的耦合减小,h和l的影响相当。具体来说,对于h和l,减少或增加1%导致这些误差减少0.21%,而对于b,减少1%导致测量误差减少0.46%。因此,为了减小误差,提高测量精度,应优先考虑较小的h。
(2)根据有限元模拟得到的反力和实验得到的耦合率,可以得出矩形双轴柔性铰链载荷端挠度越大,固定端反力越大。而反作用力是影响参考传感器输出耦合的关键因素。具体来说,当施加的挠度Δδy或Δδz从0.4 mm增加到0.6 mm时,反作用力增加了约50%,而参考传感器中的测量误差平均增加了48%。
(3)矩形双轴柔性铰链在径向上存在柔度的方向性,这导致相同值的挠度所产生的反力分别在y方向和z方向上导致不同的耦合速率。例如,将铰链更柔顺的方向(y轴)与主加载方向对齐,与z轴方向相比,测量误差降低了35.59%,从而提高了多轴加载条件下的校准精度。因此,在设计和安装铰链时应注意方向,柔度较大的方向应与待标定传感器的主负载方向一致。
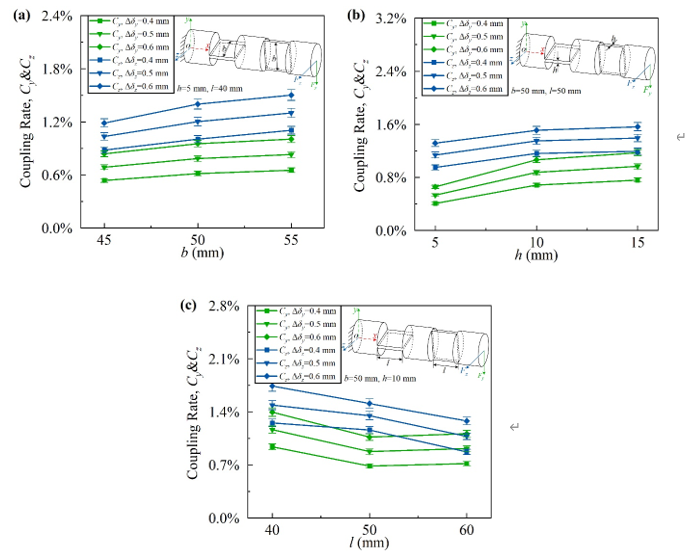
图6 参考传感器耦合速率变化与矩形双轴柔性铰链结构参数的关系:(a)宽度b;(b)厚度h;(c)长度l。
三、总结
本研究基于材料力学建立了矩形双轴柔性铰链的力学模型,表征了载荷端挠曲作用下固定端反力的变化。对b、h、l变化的柔性铰链进行了有限元仿真分析和比较。最后,通过实验验证了不同b、h、l的矩形双轴柔性铰链对力传感器耦合效果的影响。
本研究的结果为柔性铰链结构参数对参考传感器耦合效应的影响提供了定量评估。从这项研究中得出的原理也适用于柔性铰链连接到传感器的任何系统中。通过对柔性铰链的优化设计,为改进多维力标定装置的串接机构的设计,最大限度地减少维间耦合,从而提高被测传感器的标定精度提供参考。除了标定装置,Stewart平台、航空发动机测试平台和复杂的工业压力测量系统等系统也可以从减少维间耦合效应中受益,最终提高系统精度和响应速度。
原文链接:DOI: 10.1088/1361-6501/adc61f